
|
Data Structures | |
| struct | IfxMultican_Can_FdConfig |
| Structure for CAN FD configuration. More... | |
| struct | IfxMultican_Can_GatewayConfig |
| Structure for gateway configuration. More... | |
| struct | IfxMultican_Can_InterruptConfig |
| Structure for interrupt configuration. More... | |
| struct | IfxMultican_Can_InterruptSource |
| Structure for interrupt source. More... | |
| struct | IfxMultican_Can_MsgObjControl |
| Message object control. More... | |
| struct | IfxMultican_Can_Node |
| CAN node handle data structure. More... | |
| struct | IfxMultican_Can |
| CAN handle data structure. More... | |
| struct | IfxMultican_Can_Config |
| CAN module configuration. More... | |
| struct | IfxMultican_Can_MsgObj |
| CAN message object handle data structure. More... | |
| struct | IfxMultican_Can_MsgObjConfig |
| CAN message object configuration. More... | |
| struct | IfxMultican_Can_NodeConfig |
| CAN Node configuration. More... | |
Detailed Description
Data Structure Documentation
| struct IfxMultican_Can_FdConfig |
Structure for CAN FD configuration.
Definition at line 763 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| uint32 | fastBaudrate | Specifies the FD fast baudrate (Data Bit rate) |
| uint16 | fastSamplePoint | Specifies the FD fast sample point. Range = [0, 10000] resp. [0%, 100%] of the total bit time. |
| uint16 | fastSynchJumpWidth | Specifies the FD fast resynchronisation jump width. Range = [0, 10000] resp. [0%, 100%] of the total fast bit time. |
| uint16 | loopDelayOffset | Specifies the transceiver delay ompensation offset that is added to the measured transceiver delay. Range = [0, 15]. |
| uint32 | nominalBaudrate | Specifies the FD nominal baudrate (Nominal Bit Rate) |
| uint16 | nominalSamplePoint | Specifies the FD nominal sample point. Range = [0, 10000] resp. [0%, 100%] of the total bit time. |
| uint16 | nominalSynchJumpWidth | Specifies the FD nominal resynchronisation jump width. Range = [0, 10000] resp. [0%, 100%] of the total nominal bit time. |
| struct IfxMultican_Can_GatewayConfig |
Structure for gateway configuration.
Definition at line 776 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| uint32 | copyData: 1 | Specifies the choice for copying data (data low and data high) |
| uint32 | copyDataLengthCode: 1 | Specifies the choice for copying data length code. |
| uint32 | copyId: 1 | Specifies the choice for copying id of the message. |
| uint32 | enableTransmit: 1 | Specifies the enable choice of TXRQ in the destination gateway object (GDFS of source gateway object) |
| IfxMultican_MsgObjId | gatewayDstObjId | Message object number of first slave object (bottom pointer) |
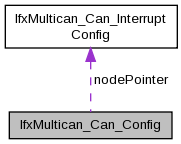
| struct IfxMultican_Can_InterruptConfig |
Structure for interrupt configuration.
Definition at line 787 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| uint16 | priority | interrupt priority |
| IfxSrc_Tos | typeOfService | type of interrupt service |
| struct IfxMultican_Can_InterruptSource |
Structure for interrupt source.
Definition at line 795 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| boolean | enabled | If true, enables the interrupt generation. |
| IfxMultican_SrcId | srcId | interrupt node pointer used |
| struct IfxMultican_Can_MsgObjControl |
Message object control.
Definition at line 803 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| IfxMultican_MsgObjId | bottomMsgObjId | Specifies the ID of the message object with data byte 36 to 63. (CAN FD) |
| uint32 | extendedFrame: 1 | Specifies the standard / extended frame mode. 0: standard frame 11 bit ID; 1: extended frame 29 bit ID. |
| uint32 | fastBitRate: 1 | Specifies the bit rate switch. 0: nominal bit rate ; 1: fast bit rate. |
| uint32 | matchingId: 1 | Specifies the acceptance mask. 0: standard & extended frame (11 & 29 bit); 1: only frames with maching IDE. |
| IfxMultican_DataLengthCode | messageLen | Specifies the length of the transmited data (number of bytes). This value is ignored for receive object. |
| uint32 | singleDataTransfer: 1 | Specifies the single data transfer option. If 1, single data transfer is selected. |
| uint32 | singleTransmitTrial: 1 | Specifies the single transmit trial option. If 1, single transmit trial is selected. |
| IfxMultican_MsgObjId | topMsgObjId | Specifies the ID of the message object with data byte 8 to 35. (CAN FD) |
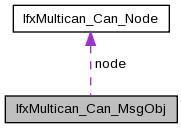
| struct IfxMultican_Can_Node |
CAN node handle data structure.
Definition at line 817 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| boolean | fastNode | CAN FD fast node enable/disable. |
| Ifx_CAN * | mcan | Specifies the pointer to the MULTICAN module registers. |
| Ifx_CAN_N * | node | Specifies the pointer to the MULTICAN node registers. |
| IfxMultican_NodeId | nodeId | Specifies the node Id. |
| struct IfxMultican_Can |
CAN handle data structure.
Definition at line 831 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| Ifx_CAN * | mcan | Specifies the pointer to the MULTICAN module registers. |
| struct IfxMultican_Can_Config |
CAN module configuration.
Definition at line 838 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| IfxMultican_ClockSelect | clockSelect | Selected module input clock. |
| Ifx_CAN * | module | pointer to MULTICAN module |
| float32 | moduleFreq | Required module frequency in Hertz. |
| IfxMultican_Can_InterruptConfig | nodePointer[IFXMULTICAN_NUM_SRC] | Node pointer configuration. |
| struct IfxMultican_Can_MsgObj |
CAN message object handle data structure.
Definition at line 848 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| IfxMultican_MsgObjId | fifoPointer | Pointer for FIFO based transfers. |
| uint16 | msgObjCount | Number of message object sto be initialised (1 for standard Msg Obj and no. of objects including base object for FIFO transfers) |
| IfxMultican_MsgObjId | msgObjId | Specifies the message object ID. |
| IfxMultican_Can_Node * | node | Specifies the pointer to the node handle. |
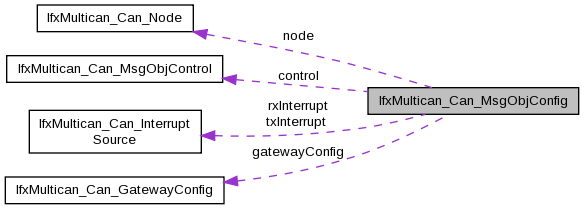
| struct IfxMultican_Can_MsgObjConfig |
CAN message object configuration.
Definition at line 858 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| uint32 | acceptanceMask | Specifies the acceptance mask. |
| IfxMultican_Can_MsgObjControl | control | Message object control. |
| IfxMultican_MsgObjId | firstSlaveObjId | Message object number of first slave object (bottom pointer) |
| IfxMultican_Frame | frame | Specifies the frame type. |
| IfxMultican_Can_GatewayConfig | gatewayConfig | Structure for gateway configuration. |
| uint32 | gatewayTransfers: 1 | Specifies the gateway source object (gateway transfres enable / disable choice) |
| uint32 | messageId | Specifies the message ID. |
| uint16 | msgObjCount | Number of message object sto be initialised (1 for standard Msg Obj and no. of objects including base object for FIFO transfers) |
| IfxMultican_MsgObjId | msgObjId | Specifies the message object ID. |
| IfxMultican_Can_Node * | node | Specifies the pointer to the node handle. |
| IfxMultican_Priority | priority | Specifies the message object priority. |
| IfxMultican_Can_InterruptSource | rxInterrupt | Rx Interrupt configuration. |
| IfxMultican_Can_InterruptSource | txInterrupt | Tx Interrupt configuration. |
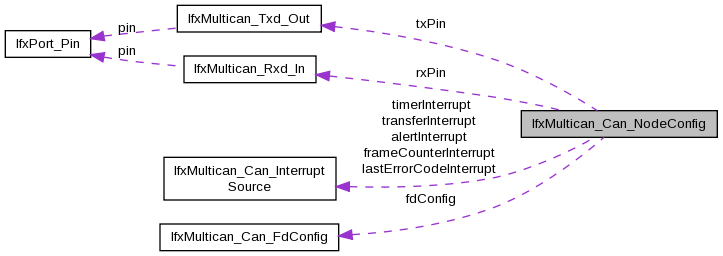
| struct IfxMultican_Can_NodeConfig |
CAN Node configuration.
Definition at line 877 of file IfxMultican_Can.h.
| Data Fields | ||
|---|---|---|
| IfxMultican_Can_InterruptSource | alertInterrupt | Alert interrupt. |
| boolean | analyzerMode | Specifies the analizer mode. If TRUE then the CAN Node works in analizer mode. |
| uint32 | baudrate | Specifies the baudrate. |
| uint8 | errorWarningLevel | Specifies the error warinig level. |
| IfxMultican_Can_FdConfig | fdConfig | Specifies CAN FD configuration. |
| boolean | flexibleDataRate | CANFD enable/disable. |
| IfxMultican_Can_InterruptSource | frameCounterInterrupt | Frame counter interrupt. |
| IfxMultican_Can_InterruptSource | lastErrorCodeInterrupt | Last error code interrupt. |
| boolean | loopBackMode | Specifies the loop back mode. If TRUE then the CAN Node works in loop back mode. |
| Ifx_CAN * | module | pointer to MULTICAN module |
| IfxMultican_NodeId | nodeId | Specifies the node Id. |
| IfxMultican_Rxd_In * | rxPin | Specifies the receive pin. |
| IfxPort_InputMode | rxPinMode | Specifies the receive pin as input mode. |
| uint16 | samplePoint | Specifies the sample point. Range = [0, 10000] resp. [0%, 100%] of the total bit time. |
| uint16 | synchJumpWidth | Specifies the resynchronisation jump width. Range = [0, 10000] resp. [0%, 100%] of the total bit time. |
| IfxMultican_Can_InterruptSource | timerInterrupt | Timer Interrupt. |
| IfxMultican_Can_InterruptSource | transferInterrupt | Transfer interrupt. |
| IfxMultican_Txd_Out * | txPin | Specifies the transmit pin. |
| IfxPort_OutputMode | txPinMode | Specifies the transmit pin output mode. |
