Data structures
Collaboration diagram for Data structures:

|
Data Structures | |
| struct | IfxGpt12_IncrEnc |
| Incremental encoder object. More... | |
| struct | IfxGpt12_IncrEnc_Config |
| Configuration structure for GPT12. More... | |
Detailed Description
Data Structure Documentation
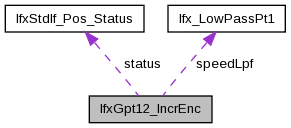
| struct IfxGpt12_IncrEnc |
Incremental encoder object.
Definition at line 193 of file IfxGpt12_IncrEnc.h.
Collaboration diagram for IfxGpt12_IncrEnc:
| Data Fields | ||
|---|---|---|
| IfxStdIf_Pos_Dir | direction | rotation direction |
| float32 | maxSpeed | Absolute maximal allowed speed. Above speed is recognized as error. |
| float32 | minSpeed | Absolute minimal allowed speed. below speed is recognized as 0rad/s. |
| Ifx_GPT12 * | module | Pointer to the GPT12 module. |
| sint32 | offset | raw position offset |
| float32 | positionConst | constant for calculating mechanical position (in rad) from raw position |
| sint32 | rawPosition |
raw position in ticks.
|
| sint32 | resolution | resolution of this position sensor interface |
| float32 | speed | mechanical speed in rad/s |
| float32 | speedConstPulseCount | constant for calculating mechanical speed (in rad/s) from raw speed in pulse count mode |
| float32 | speedConstTimeDiff | constant for calculating mechanical speed (in rad/s) from raw speed in time diff mode |
| boolean | speedFilterEnabled | Enable / disable the speed low pass filter. |
| Ifx_LowPassPt1 | speedLpf | Low pass filter object. |
| float32 | speedModeThreshold | treshold used for speed calculation using pulse count mode or time diff mode in rad/s |
| sint32 | speedModeThresholdTick | treshold used for speed calculation using pulse count mode or time diff mode in ticks |
| IfxStdIf_Pos_Status | status | error code (0 = no error) |
| sint32 | turn | number of mechanical turns |
| IfxGpt12_IncrEnc_Update | update | Update call back API. |
| float32 | updatePeriod | update period in seconds |
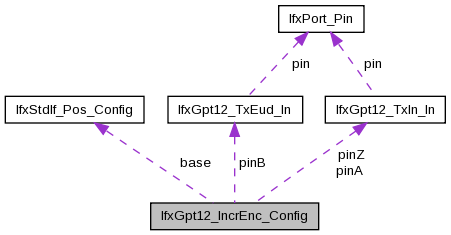
| struct IfxGpt12_IncrEnc_Config |
Configuration structure for GPT12.
Definition at line 218 of file IfxGpt12_IncrEnc.h.
Collaboration diagram for IfxGpt12_IncrEnc_Config:
| Data Fields | ||
|---|---|---|
| IfxStdIf_Pos_Config | base | Configuration data of Standard interface: Position interface. |
| Ifx_GPT12 * | module | Pointer to module base address. |
| IfxGpt12_TxIn_In * | pinA | Encoder A signal. Should be connecting to T2 or T3 TxIN. See GPT12 pin map data. |
| IfxGpt12_TxEud_In * | pinB | Encoder B signal. Should be connecting to T2 or T3 TxEUD. See GPT12 pin map data. |
| IfxPort_InputMode | pinMode | Pin mode for A, B and Z inputs. |
| IfxGpt12_TxIn_In * | pinZ | Encoder Z signal. Should be connecting to T4 TxIn for use with T3 and TxEUD (Ignore compiler type conflict warning) for use with T4. See GPT12 pin map data. |
| Ifx_Priority | zeroIsrPriority | Interrupt isrPriority of the zero interrupt, if 0 the interrupt is disable. |
| IfxSrc_Tos | zeroIsrProvider | Interrupt service provider for the zero interrupt. |
